Understand Your Side Imaging Range
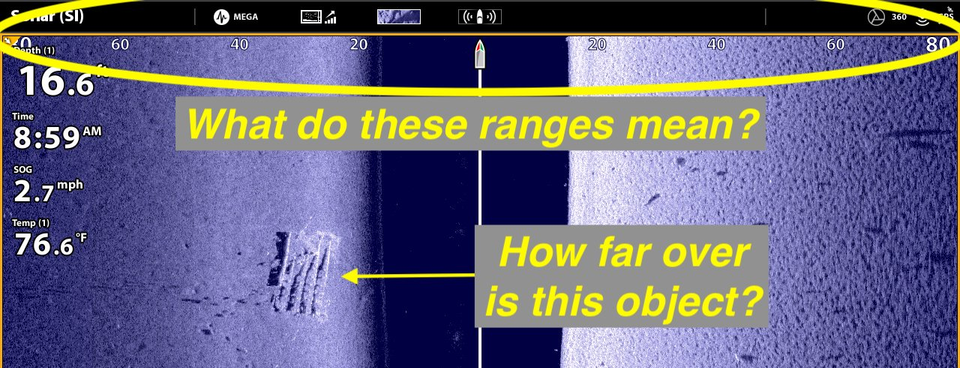
You've seen them across the top of the Side Imaging view on your Humminbird HELIX or SOLIX Side Imaging fish finders: range values that describe how far away structure and fish are from the boat, off to the left and right sides. But how accurate are these ranges, and what exactly do they represent?
1. SIDE IMAGING RANGE REPRESENTS DISTANCE FROM THE TRANSDUCER
It is important to recognize that the Side Imaging range values you see displayed across the top of the SI view represent distances from the transducer, and those distances have two components: a lateral, or side-to-side distance, as well as a vertical distance, arising from the object's depth. The sum of the lateral distance plus the vertical distance separating the object and the transducer determines the object's range. As a result, objects observed in Side Imaging, off to one side of the boat or the other, are frequently closer to the boat than you might otherwise think. Happily, in many circumstances, it is possible to separate the two distances to more accurately estimate the lateral, or side-to-side distance between an object and the boat.
2. SIDE IMAGING RANGE CAN BE AN ENTIRELY VERTICAL DISTANCE
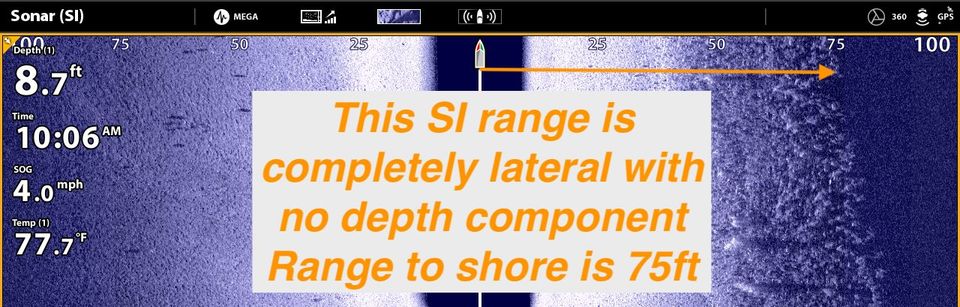
There is one place on the Side Imaging view where the Side Imaging range is equal to the water's depth and has no lateral (side-to-side) component, and that is where the bottom first appears on either side of the water column stripe:
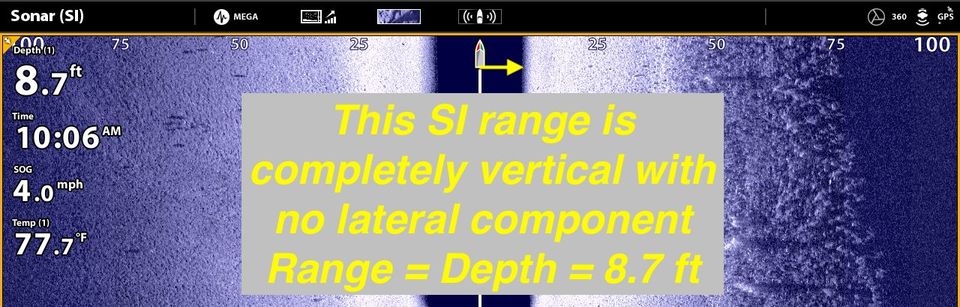
In this case, the digital depth measurement (8.7 ft in the example image) reflects the water depth at the boat's position, and is reflected in the thickness of the water column stripe at that location. The Side Imaging range, as it applies to the bottom return at the top of the SI view, therefore is a purely vertical measurement with no lateral component.
3. SIDE IMAGING RANGE CAN BE AN ENTIRELY LATERAL DISTANCE
Objects that appear in the Side Imaging view that have zero depth represent objects whose Side Imaging range is entirely lateral, with no vertical (depth) component. This could represent a fish that is suspended at the surface or a boat or swim platform that is floating in the water. The most common object that you will see on your Side Imaging view with a purely lateral Side Imaging range is the shoreline:
4. FOR MOST OBJECTS, SIDE IMAGING RANGE HAS VERTICAL AND LATERAL COMPONENTS
Unless we're talking about the bottom beneath the boat (100% vertical) or the shoreline (100% lateral), everything else in the Side Imaging view has its range determined by the combination of its depth and its lateral, or side-to-side, distance.
For any object, we can build a triangle in which depth at that object is a vertical leg, the true lateral distance to that object is the horizontal leg, and the Side Imaging range is the triangle's hypotenuse. Your old friend from high school geometry class, the Pythagorean Theorem (a2 + b2 = c2) allows us to calculate the unknown, true lateral distance if we know the other two. For example:
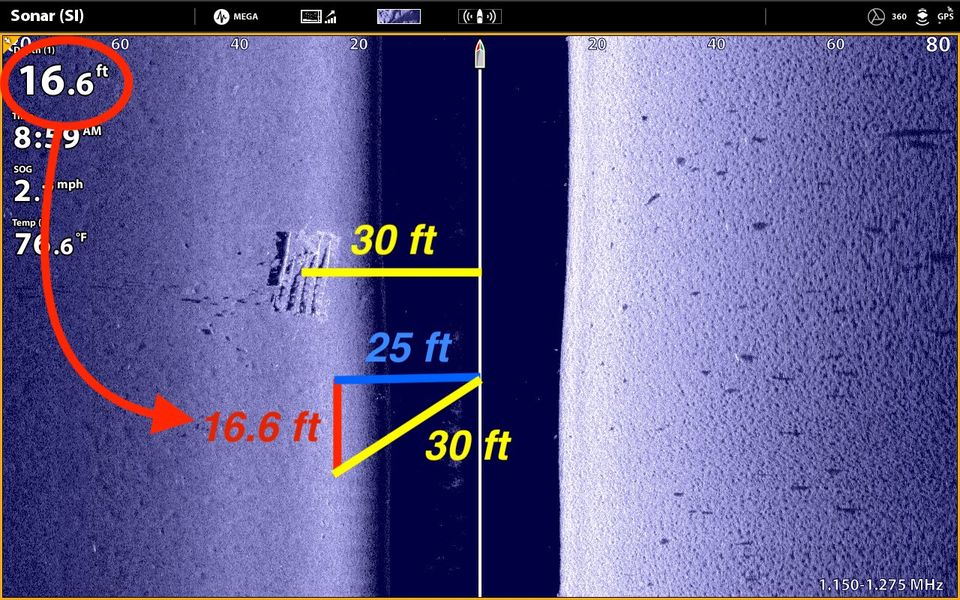
Consider the object on the left Side Image. The Side Imaging range to the center of the object is ~ 30 feet. If we assume that the water depth at the object matches the depth under the boat (16.6 ft; a reasonable assumption here because this is a featureless flat), then the true lateral distance to the object is 25 feet, closer to the boat than the 30 foot Side Imaging range might suggest.
Any object on the bottom or fish suspended in the middle of the water column is, in fact, closer to the boat than is suggested by its Side Imaging range. This difference is most pronounced in deep water. Here's another example:
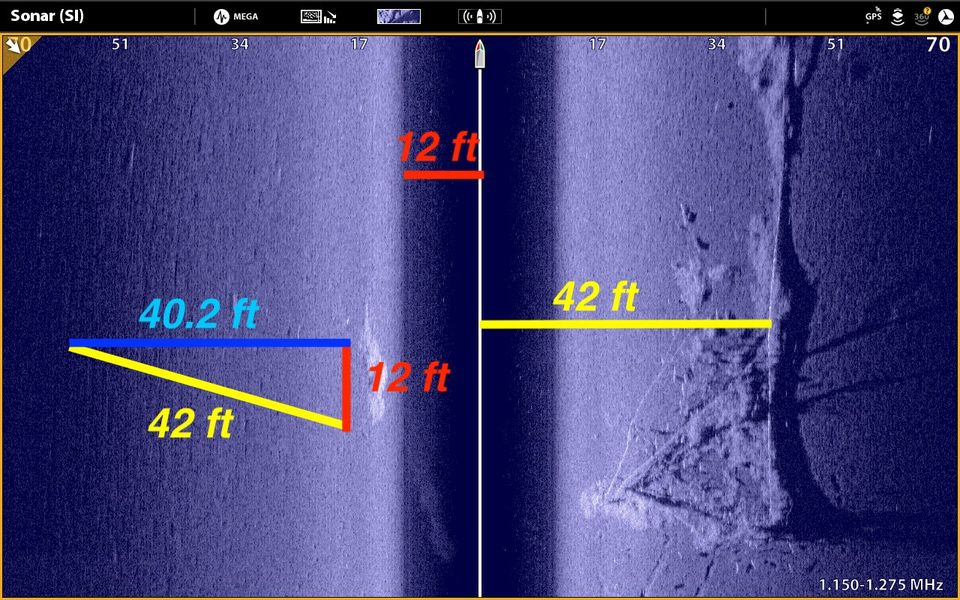
This Side Image of a fallen tree was collected in water that is 12 feet deep. The Side Imaging range of the tree is 42 feet to the right. These distances allow us to calculate a true lateral distance to the tree of just over 40 feet. Obviously, this is quite close the the SI range of 42; here, the small difference between the two distances arises because we are in relatively shallow water. Indeed, in shallow water, the measured SI ranges are, in fact, quite close (but still a little less) than the actual distances. Here's a third example, again from shallow water:
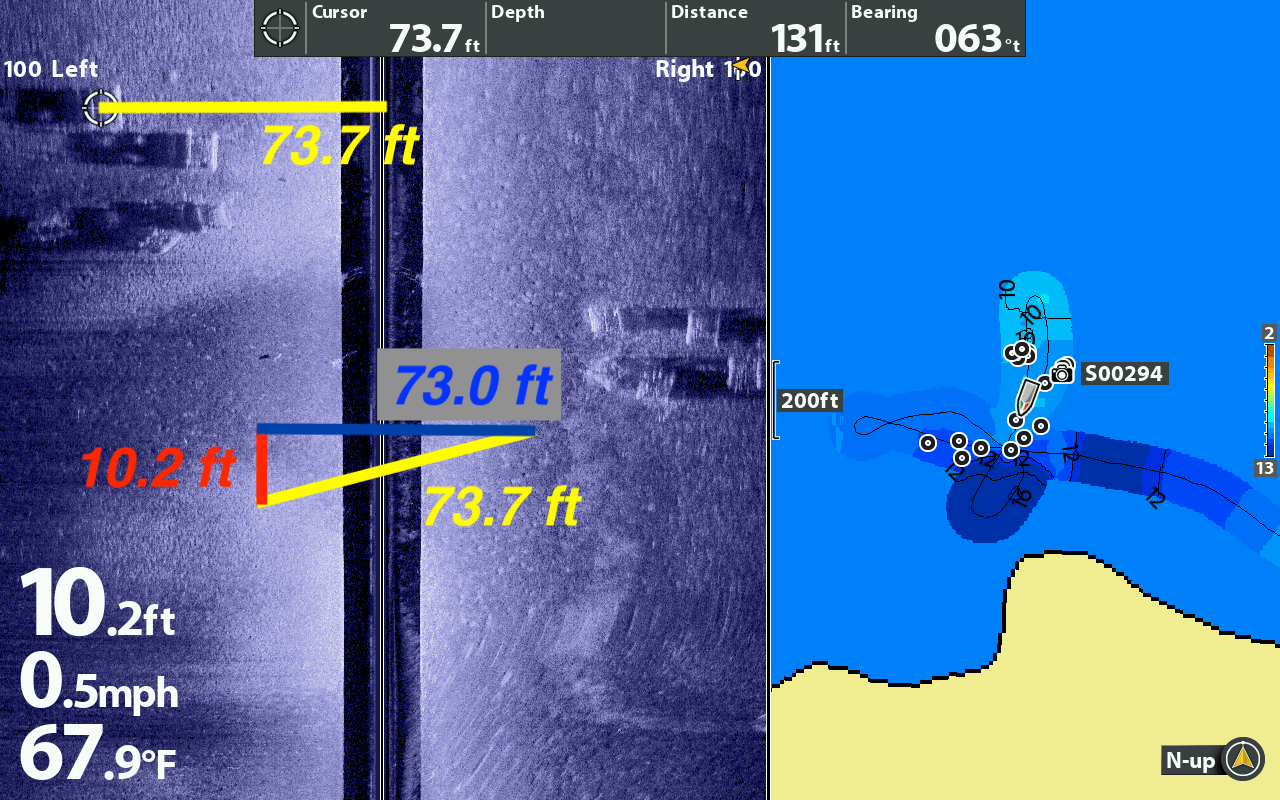
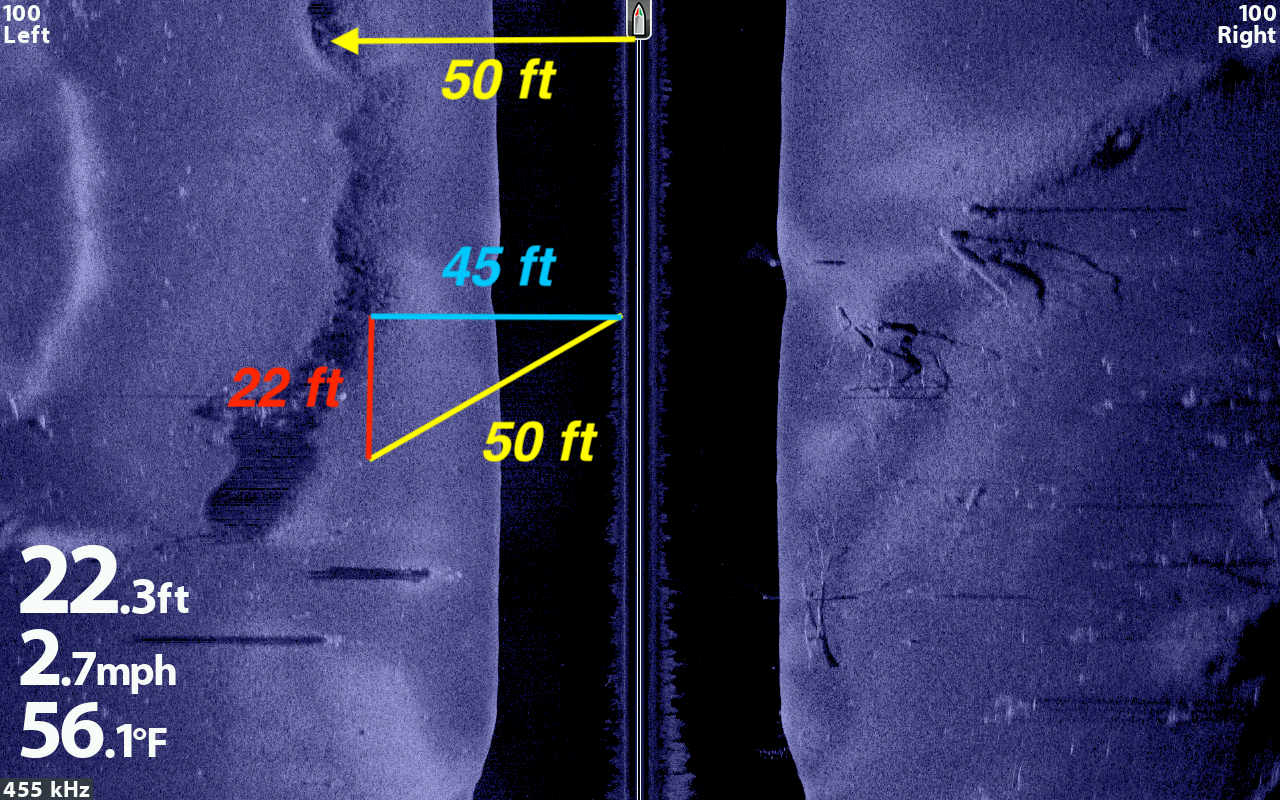
Here's one final example from water that is a little deeper. In each case, note that the difference between Side Imaging range and the true lateral distance increases as the water depth increases:
What does all of this mean for those of us that rely on Side Imaging to locate structure and fish? The primary take-away is that anything we see off to the sides, other than the shoreline, is closer to the boat than the SI range might suggest. How much closer? That depends on water depth; the deeper the water, the closer to the boat that an object is.
How does this apply to waypoints you create with Side Imaging? Those waypoints are dropped at a location that assumes that the SI range is 100% lateral - with no vertical component. That is, of course, incorrect.
When you drop a waypoint in Side Imaging, the underwater object will be near your waypoint, but not necessarily on it. In will be closer to the boat than the waypoint suggests. The best way to confirm the waypoint's location is to drive over to the area with the structure of interest, re-find it using your narrowest beam 2D sonar, settle directly on top of the object, and drop another waypoint. This second waypoint should be more representative of the object's true location (within the inherent uncertainties of GPS (3 m) and the 2D sonar cone angle) than is the first waypoint, created solely by Side Imaging.
LEARN MORE FROM THE TECHNOLOGICAL ANGLER